deep reinforcement learning
The DARPA Subterranean (SubT) Challenge aims to develop innovative technologies that would augment operations underground. The SubT Challenge will explore new approaches to rapidly map, navigate, search, and exploit complex underground environments, including human-made tunnel systems, urban underground, and natural cave networks.
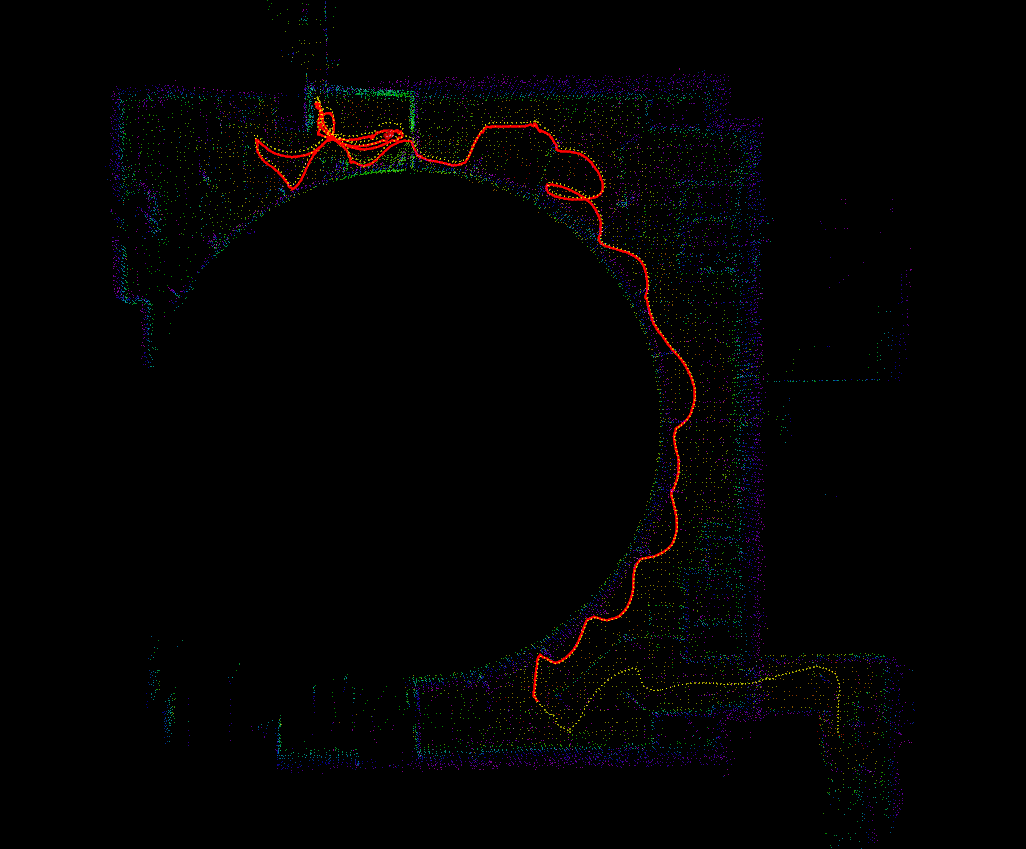
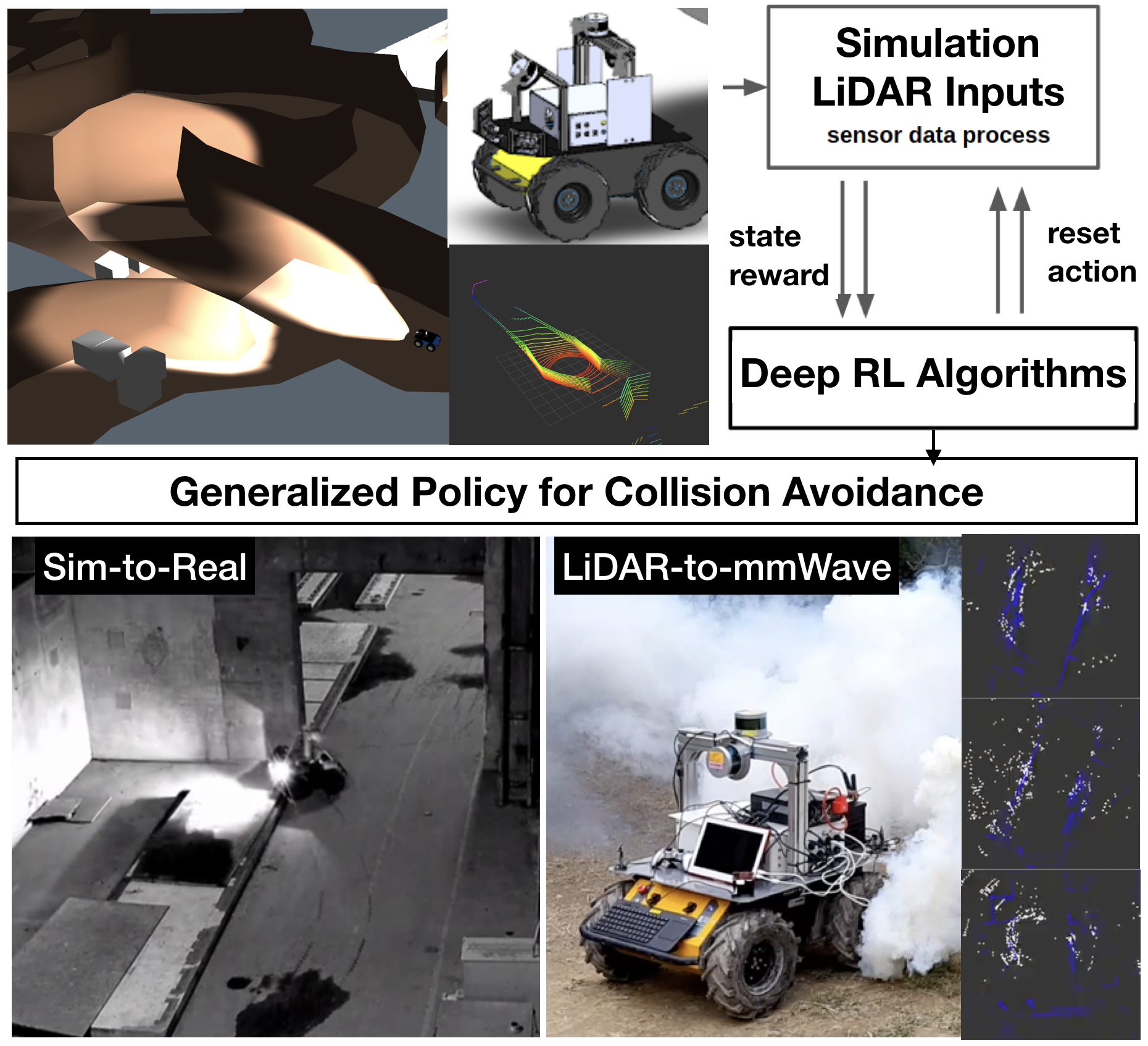
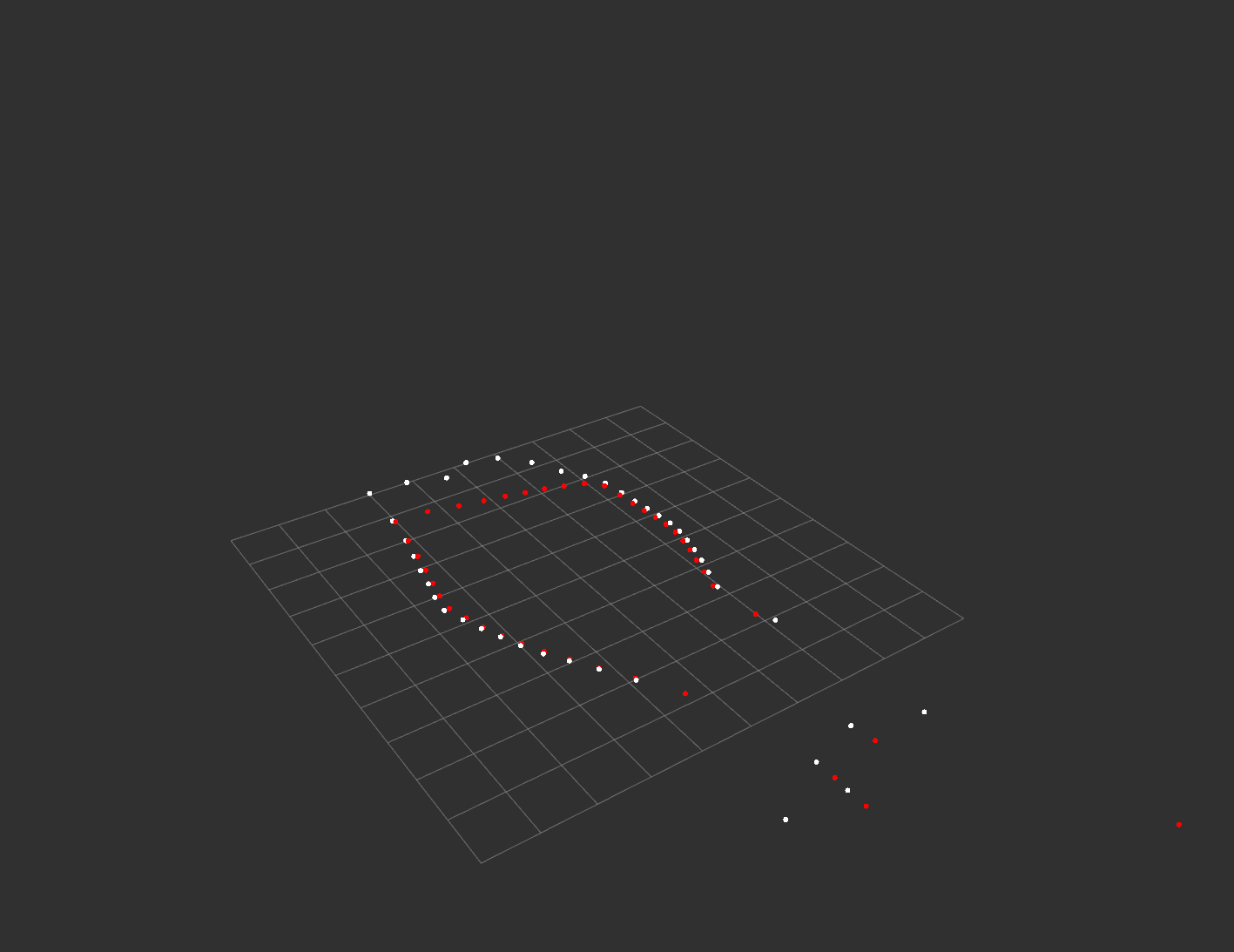
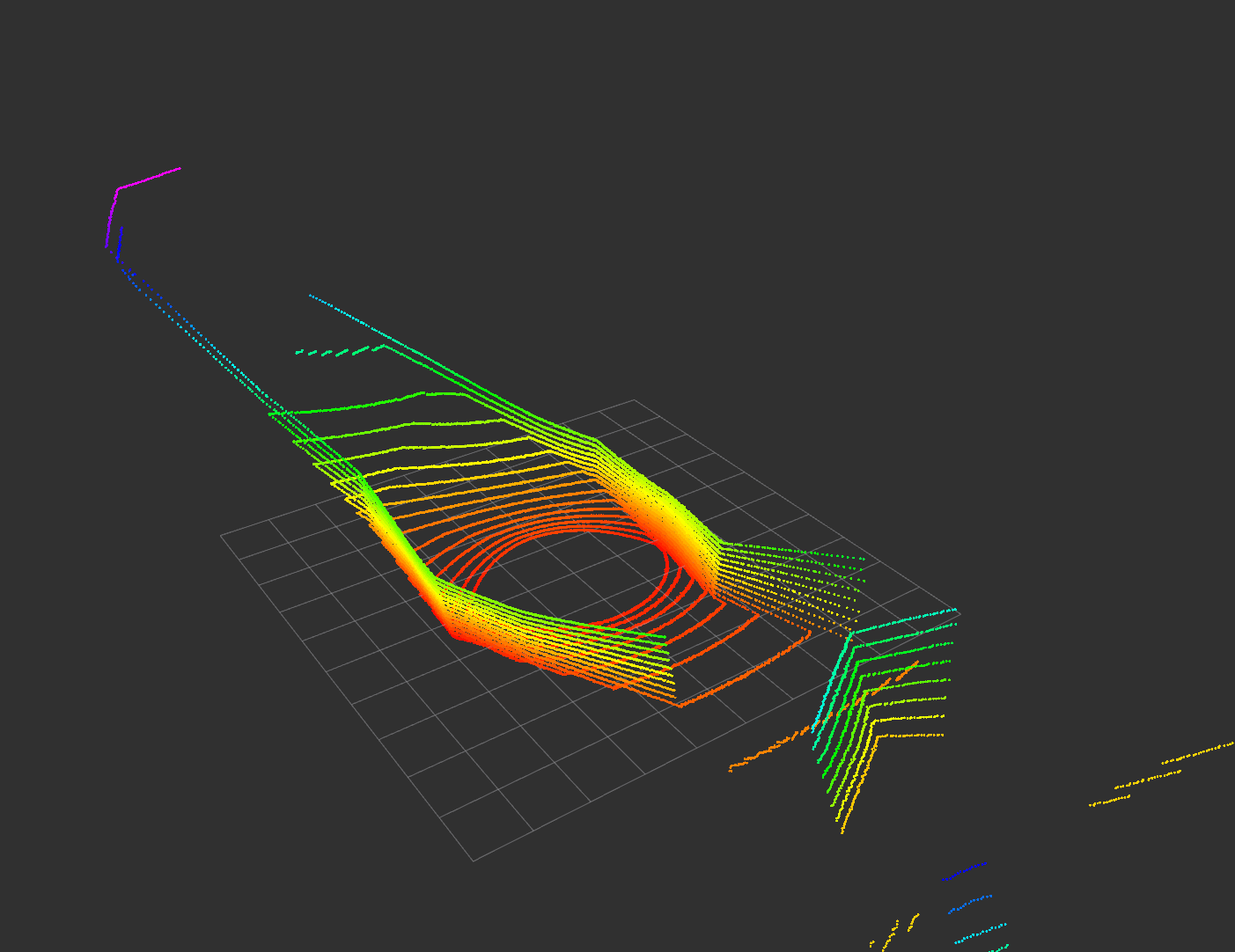
Deep reinforcement learning (RL) have shown remarkable success on a variety of tasks to learn from mistakes. To learn collision-free policies for unmanned vehicles, deep RL has been trained with various data modalities including RGB, depth images, LiDAR point clouds without the use of classic map-localize-plan approaches. However, to operate in constrained passages under subterranean environments, existing methods are suffered from degraded sensing conditions, such as smoke and other obscurants, that impairs observations from camera and LiDAR. We propose sim-to-real, LiDAR-to-mmWave (millimeter wave radar) input modality for deep RL to overcome the challenges. We show that the trained models are generalized from simulation to real world, as well as LiDAR to mmWave transferring, despite the low spatial resolution and noisy inputs. Evaluations are carried out in underground environments, including a basement floor and large-scale testbeds in the Tunnel and Urban Circuits of the DARPA Subterranean Challenge. We provide an open dataset of real-world data for further comparisons.
Urban Circuit - seatle - 2020
virtual subt
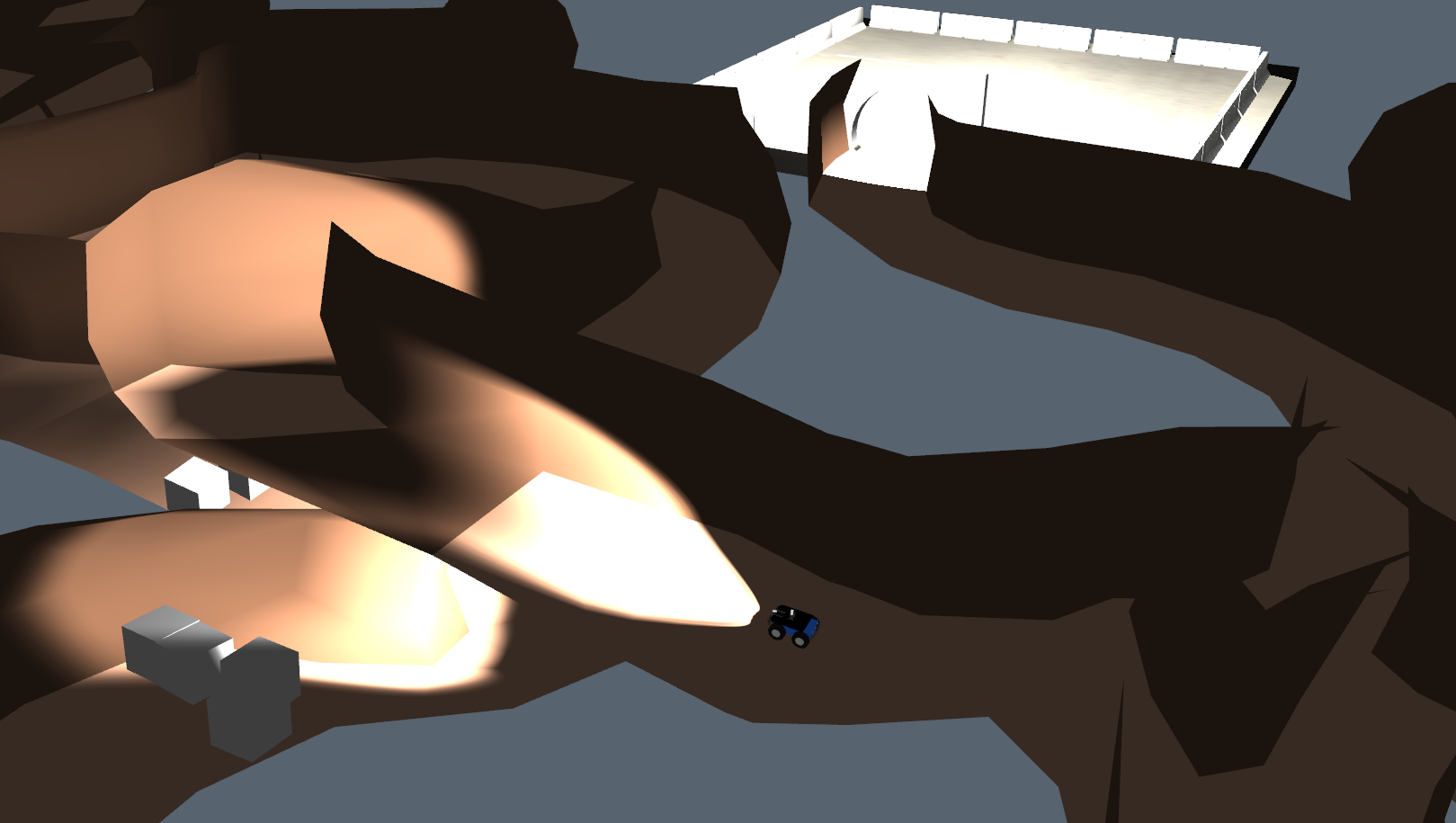
virtual subt
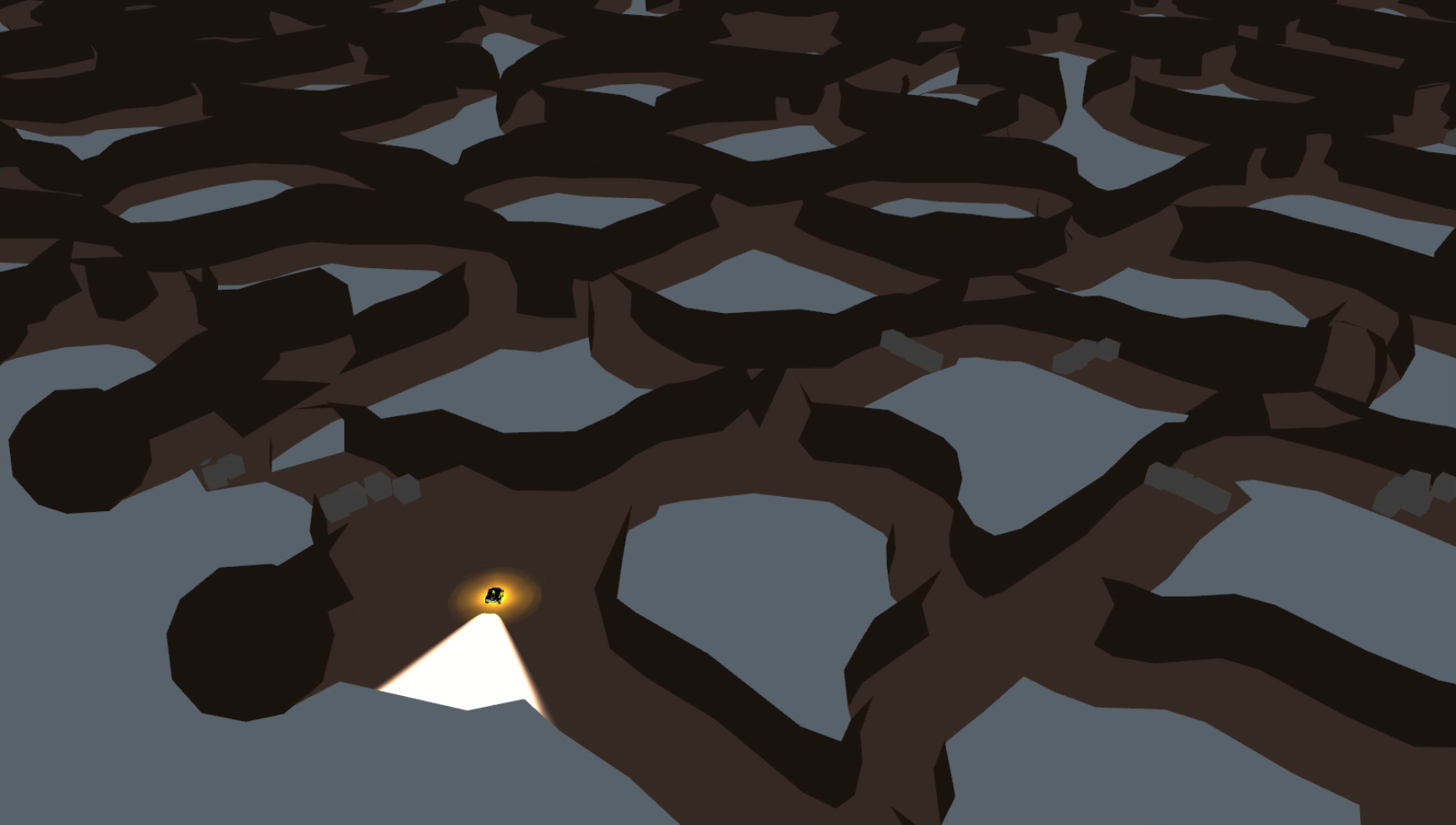
virtual subt
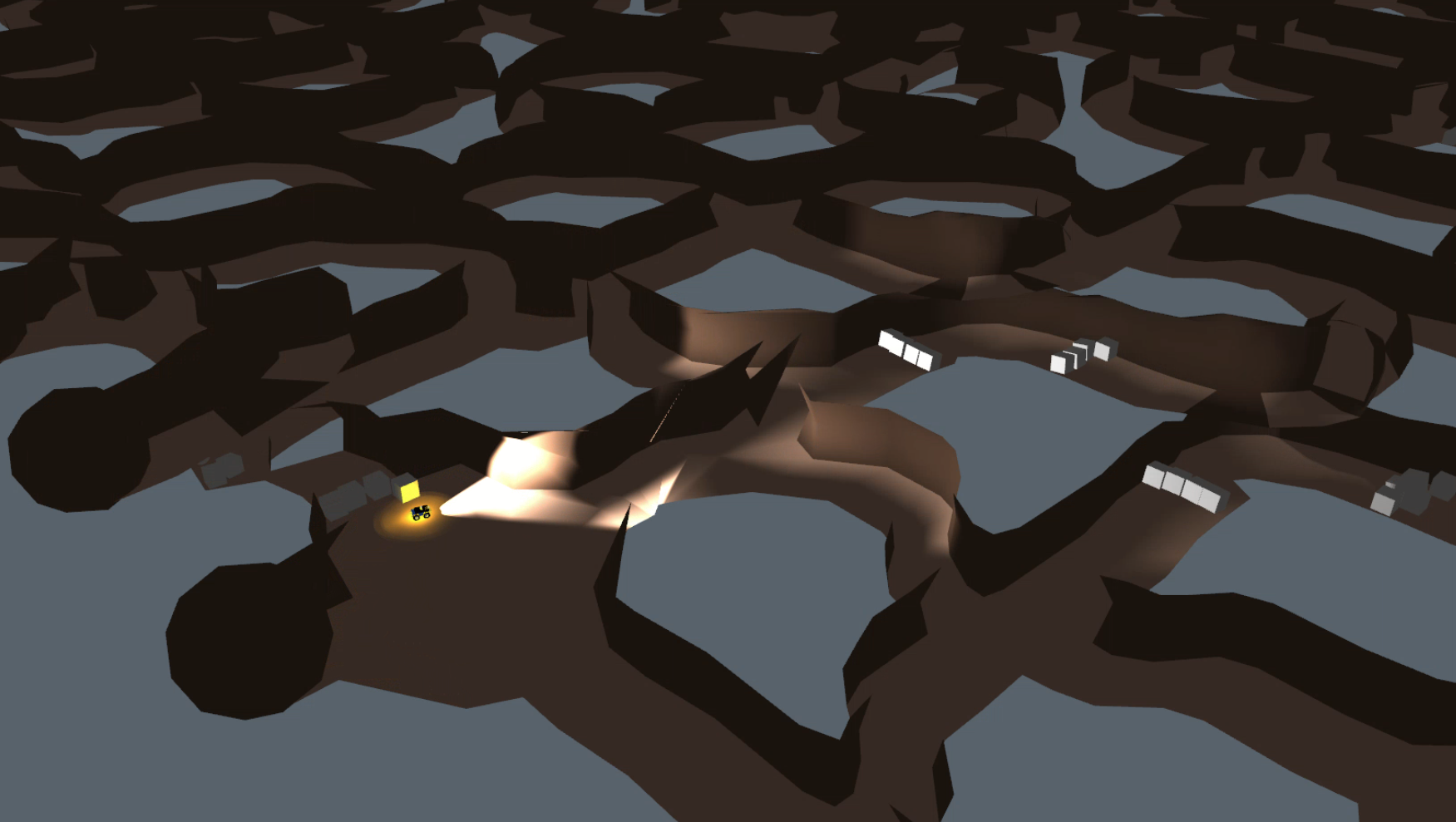
virtual subt
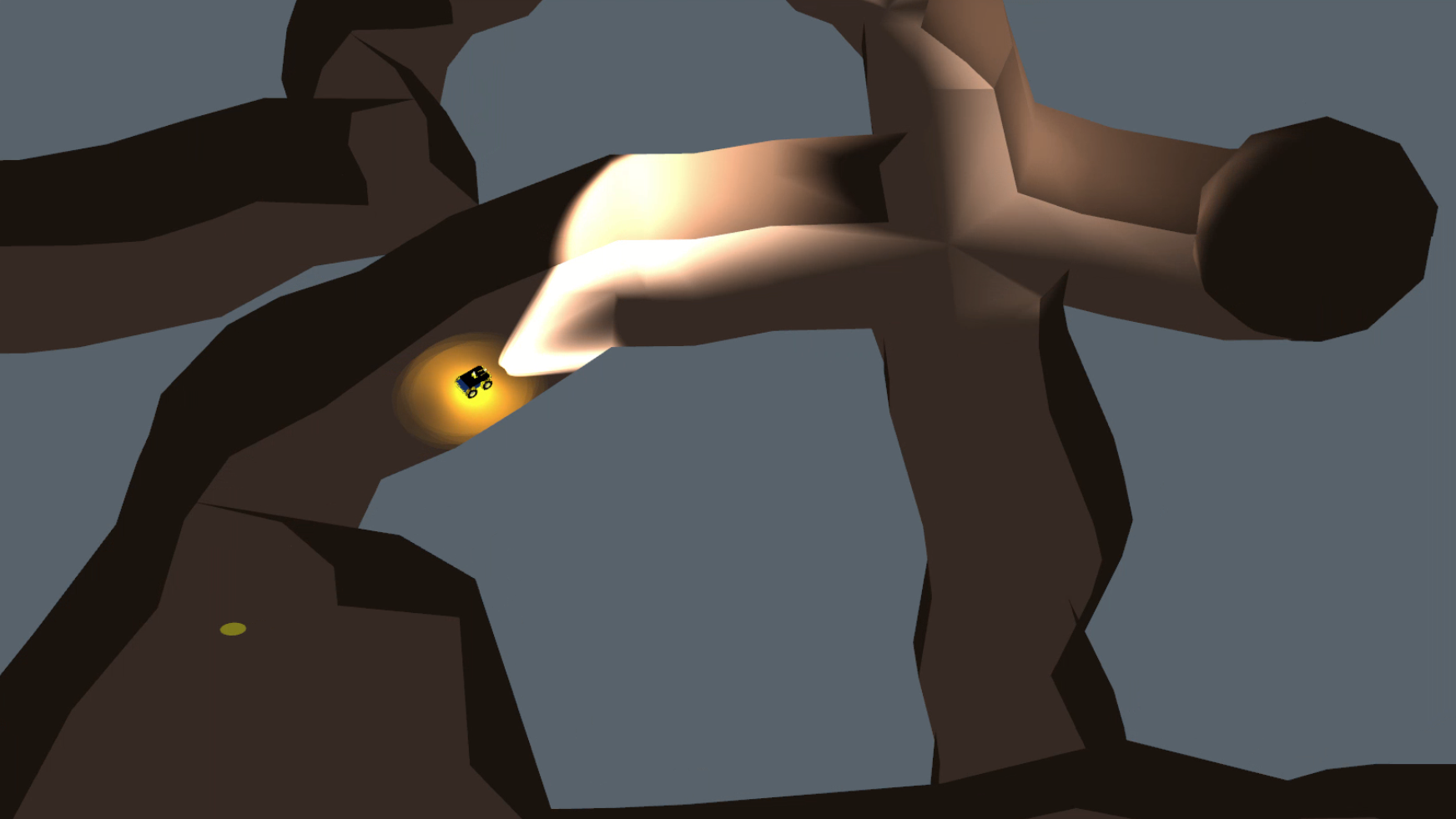
virtual subt
virtual subt
virtual subt
virtual subt
virtual subt