Urban Circuit - Seatle - 2020
The DARPA Subterranean (SubT) Challenge aims to develop innovative technologies that would augment operations underground. The SubT Challenge will explore new approaches to rapidly map, navigate, search, and exploit complex underground environments, including human-made tunnel systems, urban underground, and natural cave networks.
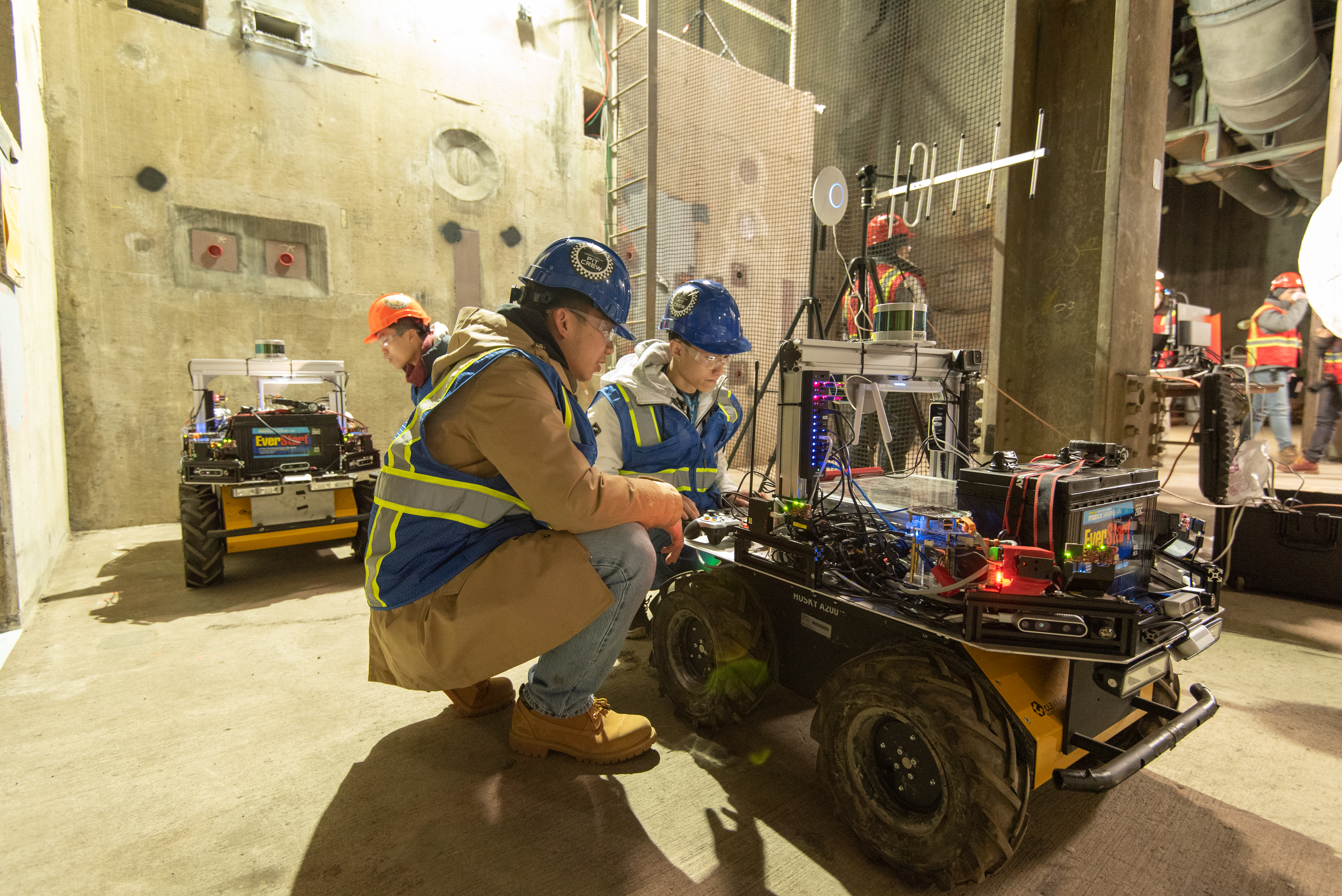
In DARPA SubT urban circuit. My work was to handle the entire system structure including navigation, localization, artifact report systems and user interface. Also i'm the onyl human operator on my team who can operate and monitor the robot to autonomously perform search and rescue during the competition.
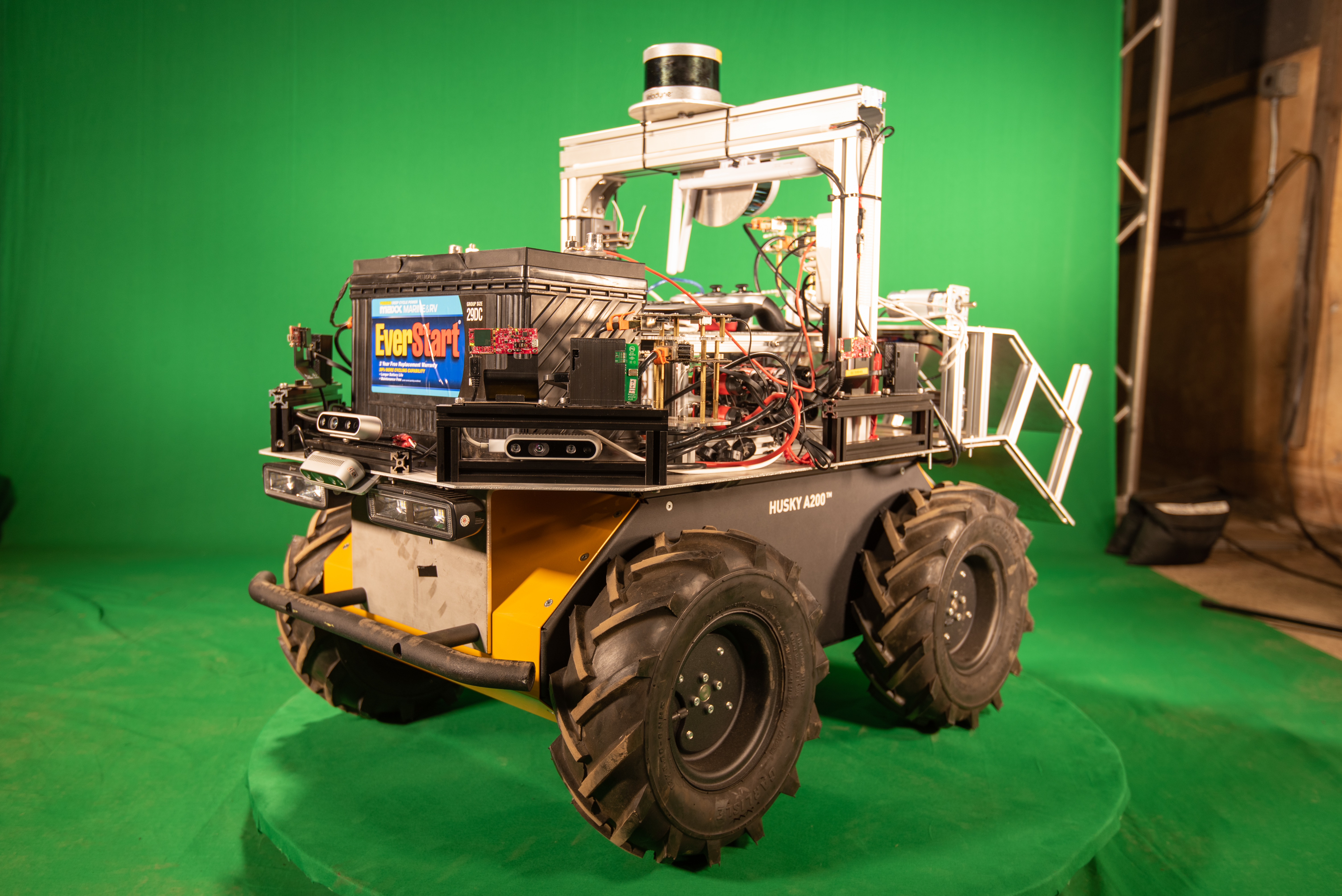
Autonomously navigate and explore the environment is crucial capability for our robot. We use deep reinforcement learning algorithms to train an agent navigate in the environment.
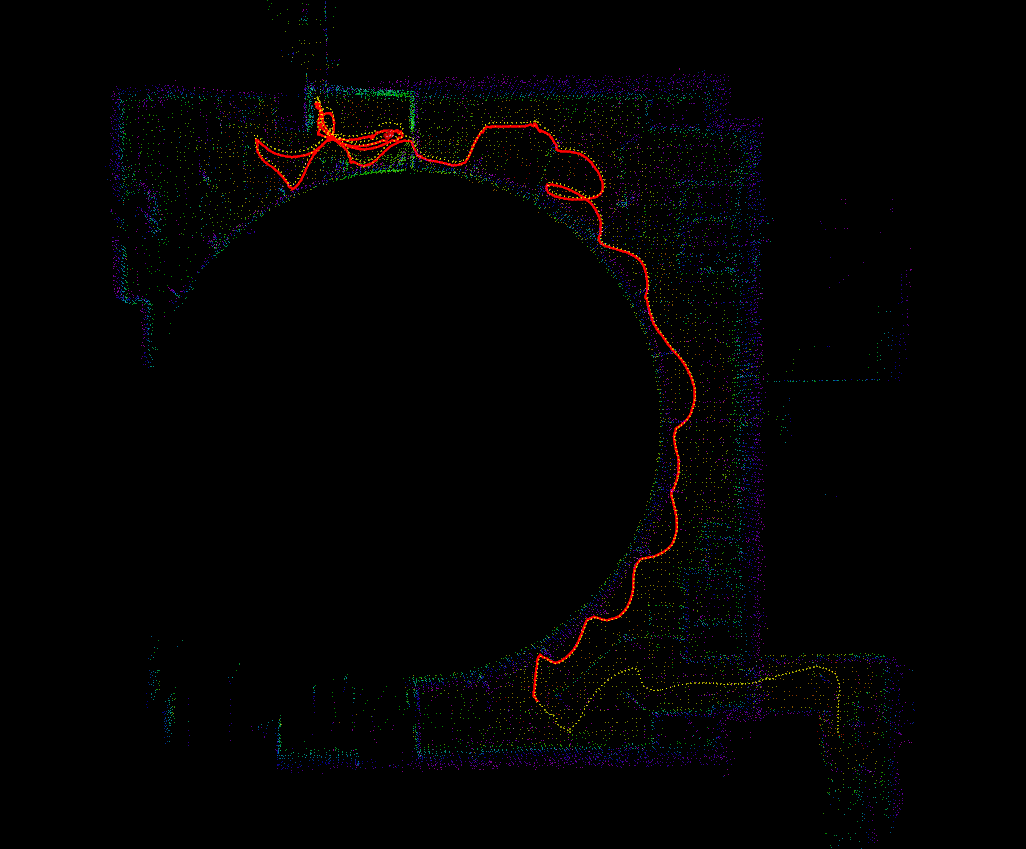
In order to report the position of the artifacts, we need to know the position of our robots. We use the opensource algorithm: LEGO-LOAM intergrated in our system to perform simultaneously localization and mapping.
To autonomously detect the designated artifacts in the environment. We implemented several SOTA object detection and instance segmentation deep learning algorithms with RGB and thermal images.
Communication between robots and human supervisor is limited in the subterranean environments. We used 2 different frequencies of radio communation to sent our custom data packets. We also deployed relays to maintain minimum communication for robots to send reports back to huamn supervisor.

Urban Circuit - seatle - 2020
Urban Circuit - seatle - 2020

Urban Circuit - seatle - 2020

Urban Circuit - seatle - 2020

Urban Circuit - seatle - 2020

Urban Circuit - seatle - 2020
Urban Circuit - seatle - 2020
Urban Circuit - seatle - 2020

Urban Circuit - seatle - 2020

Urban Circuit - seatle - 2020

Urban Circuit - seatle - 2020