An Open Education and Research Environment for a Fleet of Autonomous Maritime Vehicles
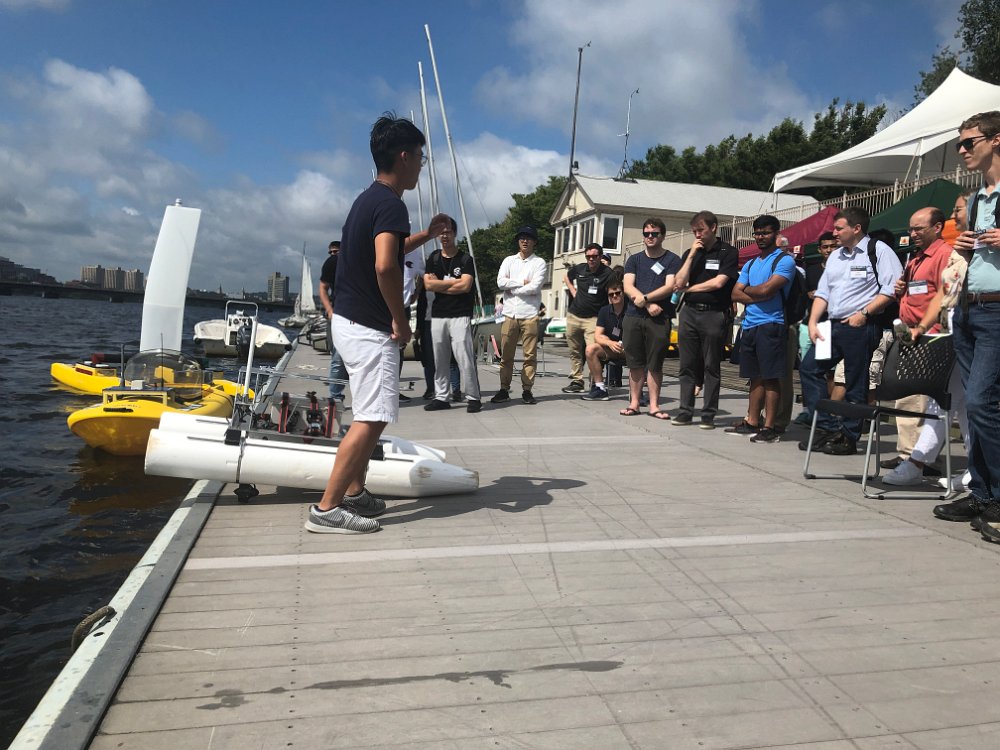
This project is to help the people who are interested in marine robotics. We built a low-cost surface vehicle called duckieboat. This type of vehicles are designed for beginers of marine robotics, and it is compatible with machine learning frame works. We demonstrate one boat running classic GPS navigation with another boat runing object detection and tracking the front boat. We also wrtie tutorials for user to play with.
My work in this project is to train a object-detector to track the boat using SOTA neural network architectures and conduct experiments for robustness.
This project has a paper submmited to 2019 IROS please visit our website for further details. We also participate the 2019 MOOS-DAWG an event held for marine robotics at MIT boston. I represented our team to have a talk at CSAIL-MIT.

MOOS-DAWG MIT 2019

MOOS-DAWG MIT 2019

MOOS-DAWG MIT 2019

MOOS-DAWG MIT 2019

MOOS-DAWG MIT 2019
MOOS-DAWG MIT 2019

MOOS-DAWG MIT 2019

MOOS-DAWG MIT 2019

MOOS-DAWG MIT 2019

MOOS-DAWG MIT 2019

MOOS-DAWG MIT 2019
MOOS-DAWG MIT 2019

MOOS-DAWG MIT 2019