Balanbot
two-wheeled self-balanced vehicle
About Balanbot
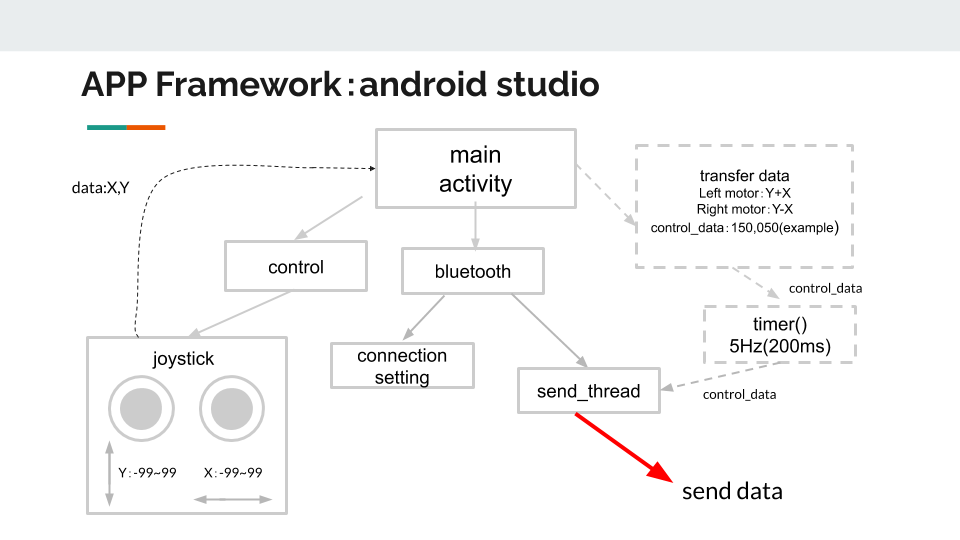
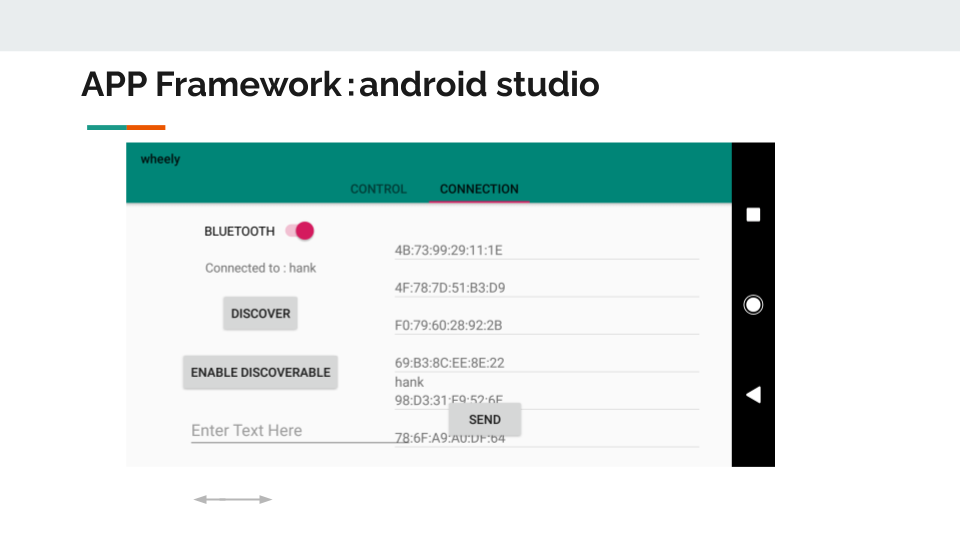
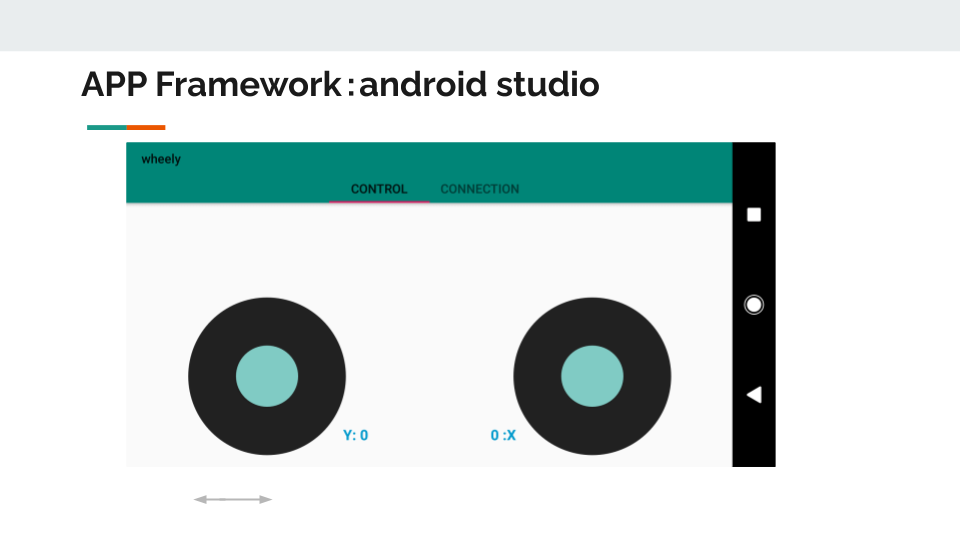
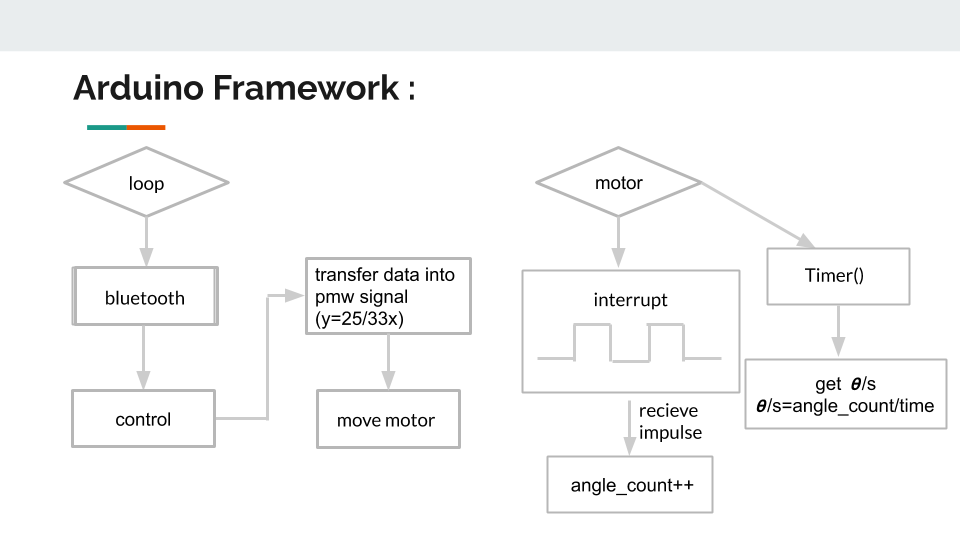
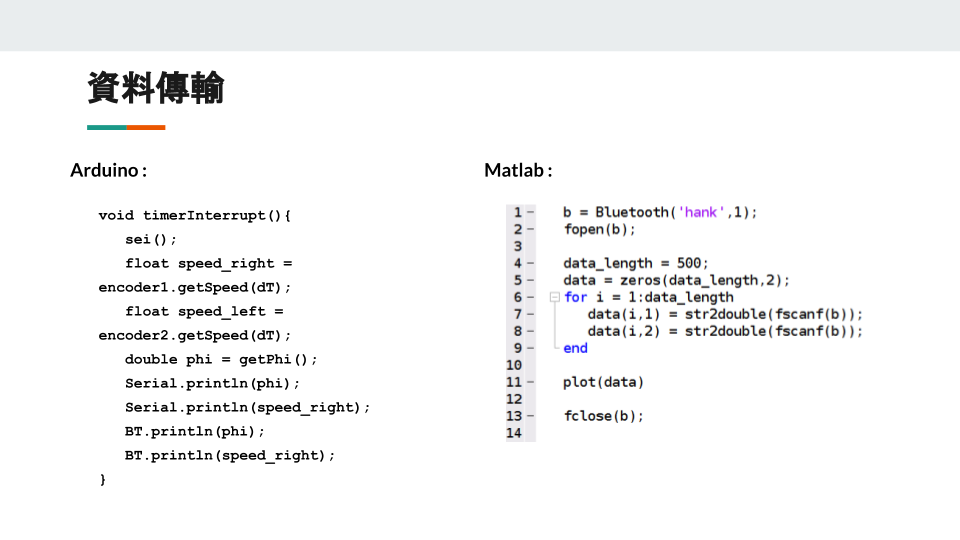
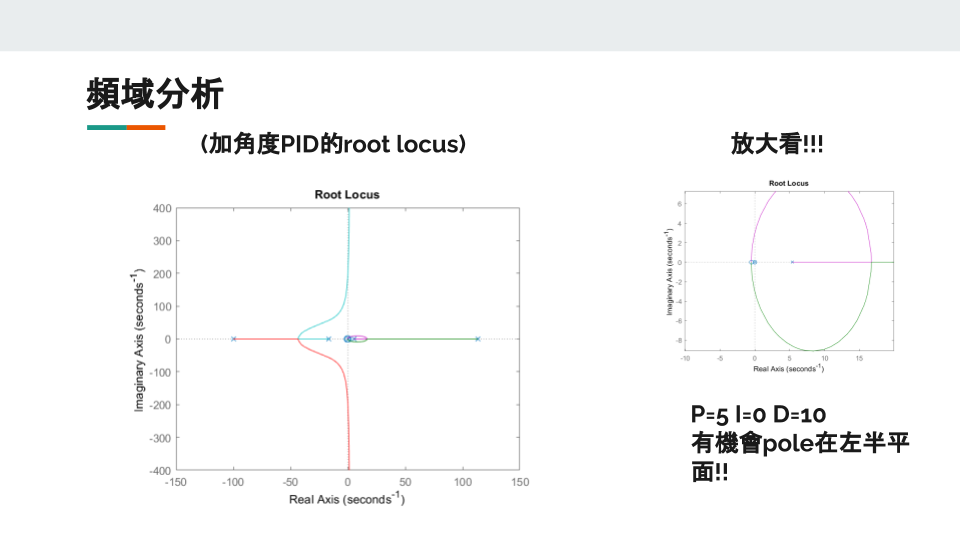
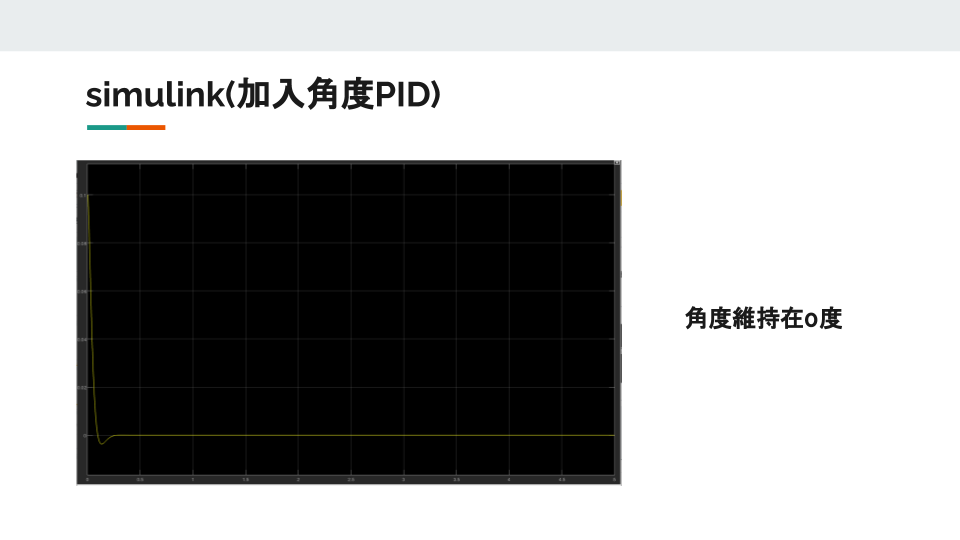
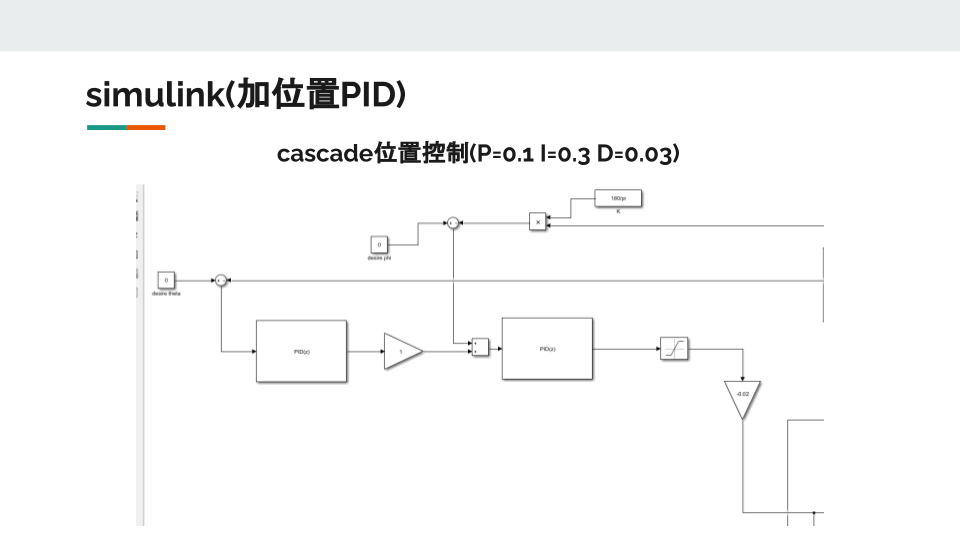
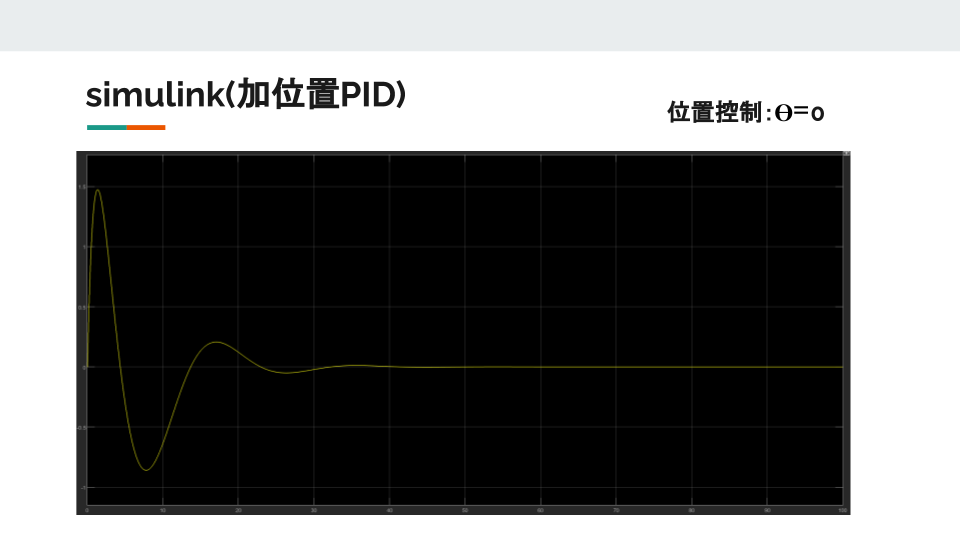
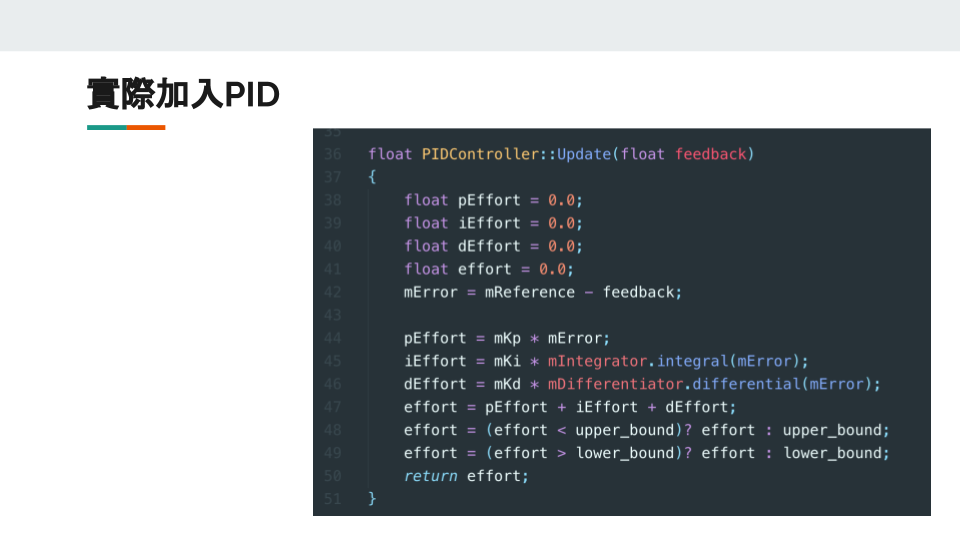
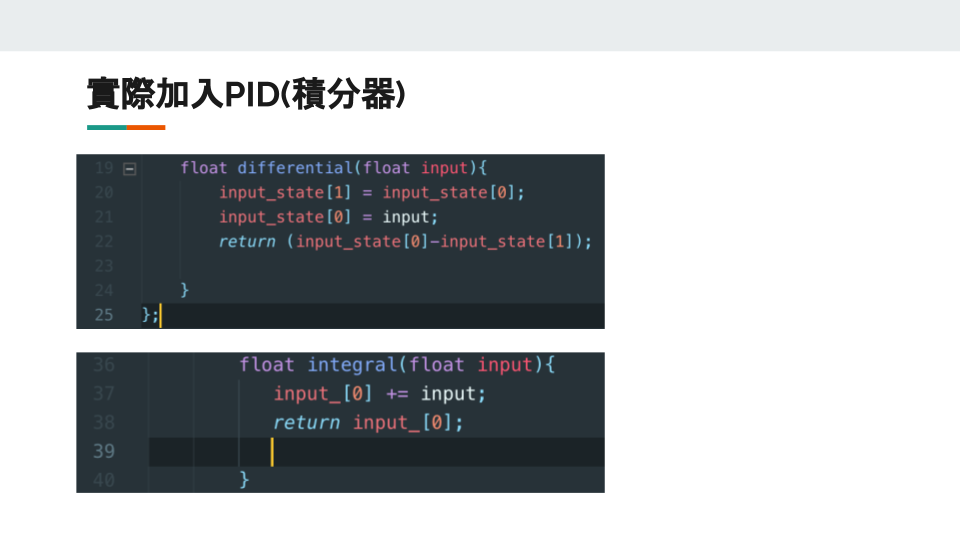
This project is with class: control system and designed. We built an two-wheeled self balance bot, that can remote control through smartphones or navigate to designated locations. The balanbot has wheel encoders, inertial measurement unit and bluetooth equiped and intergrated with arduino. We use the mathematic control theorem to write the program to balance and control the robot at the same time.
photos / videos


Contact Me